
When Microsoft Kinect first reached hackers and university labs, the most interesting experiments had very little to do with living-room games. MIT student Phillip Roebbel connected a newly hacked Xbox Kinect sensor to an iRobot and gave the robot a simple but powerful new ability: it could see a room, map nearby terrain, spot a person, and respond to gestures.
That made the demo more than a novelty. Kinect's depth camera could already judge distance and rough shape; putting it on a mobile robot turned that sensing layer into spatial awareness. The result was a machine that could wander, understand where it was in relation to the room, and react when a person moved in front of it.
Roebbel told SingularityHub that the long-term idea was a rescue robot that could help locate missing people in disaster zones. The 2010 version was obviously early, but the direction was clear: cheap sensors, better perception, and gesture-based control were starting to move robotics out of industrial labs and into more accessible experiments.
Why This Still Matters
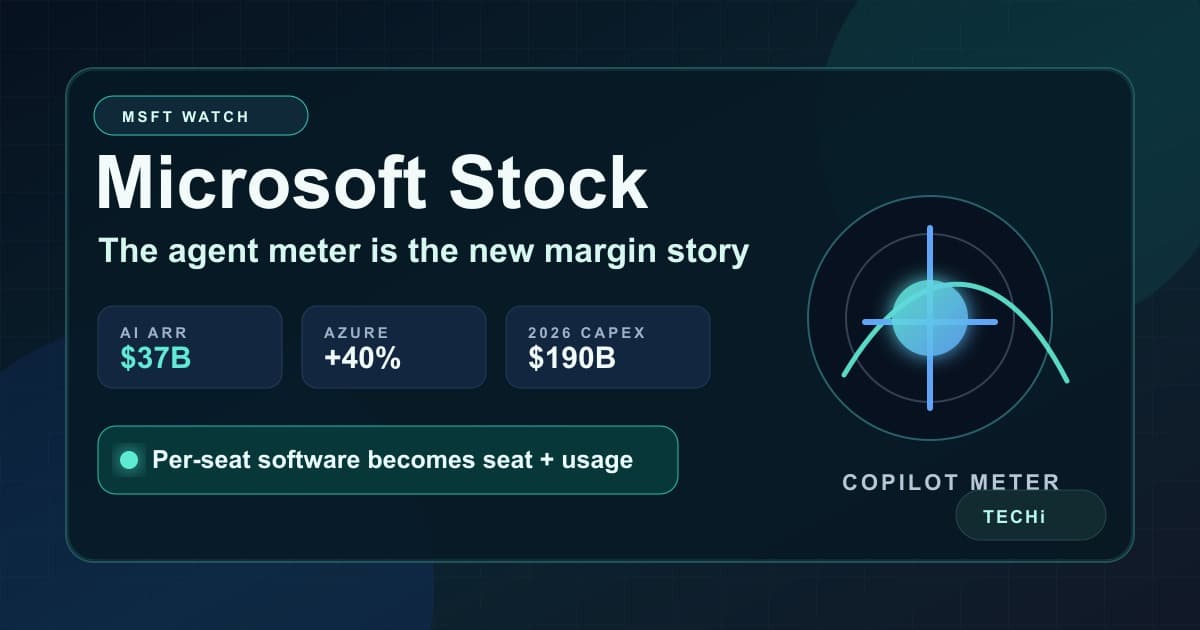
This archive piece is a snapshot of the moment consumer hardware began feeding serious robotics research. TECHi now covers that same arc through modern chip and AI systems, including Qualcomm's robotics chip push, the labor questions around Hyundai humanoid robots, and Microsoft's broader AI platform economics in Microsoft Stock: The Agent Meter Is the New Margin Story. The old Kinect robot looks simple now, but it points at the same core problem: giving machines enough perception to act safely in the physical world.
About the Author
Ty is an illustrator who stays up too late and must wear glasses.