Eat Your Heart Out, Kinect – Robot Arm Mimics Your Gestures

How cool is this? The answer, before you read any further or watch the video for additional information, is this: really cool.
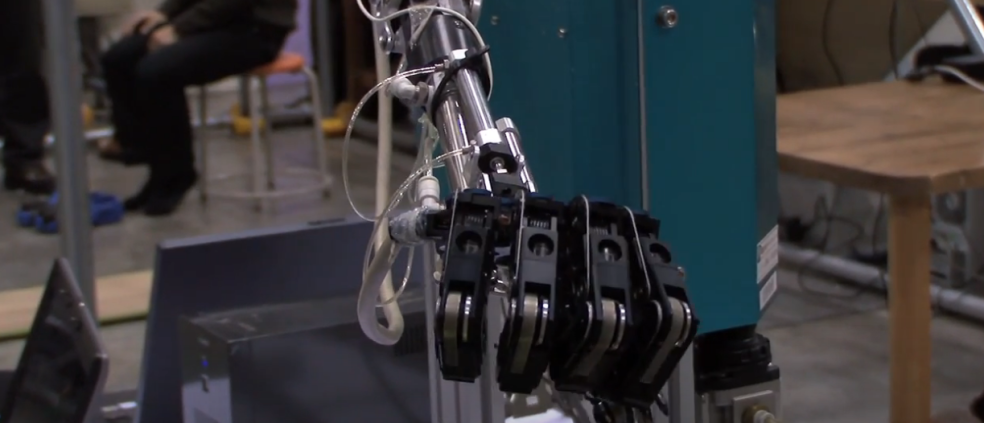
The Biological Cybernetics Lab at Tsukuba University here demonstrate a robotic arm that mimics a user’s movement via Kinect-like camera. It can recognize over 100 different hand shapes (after all, some of us, myself included, have pretty weird hands), and checks over one hundred times per second what position your hand is in, so it can adjust itself accordingly.
The idea is not only to provide a real-time robotic control solution, but also an intuitive way to program a robotic arm, for those of us who are code-stupid.
Of course, the system isn’t perfect, and that lag won’t make for any real-time life-sized Rock’em Sock’em Robots any time soon, but for a prototype, I’d be willing to claim that this is all sorts of bitchin’.
More About Kinect

A company called Tactical Haptics demonstrated their new device at GDC 2013 last month. The company was founded by Professor…

With over 70 million consoles sold since it was unveiled in May, 2005, the Xbox 360 is one of the…

The Pez is strong with this one. If there's one thing we've learned about true geeks over the years, it's…

Sony started teasing a big event that they'll be hosting on February 20th. Much of the blogosphere is buzzing that…