How cool is this? The answer, before you read any further or watch the video for additional information, is this: really cool.
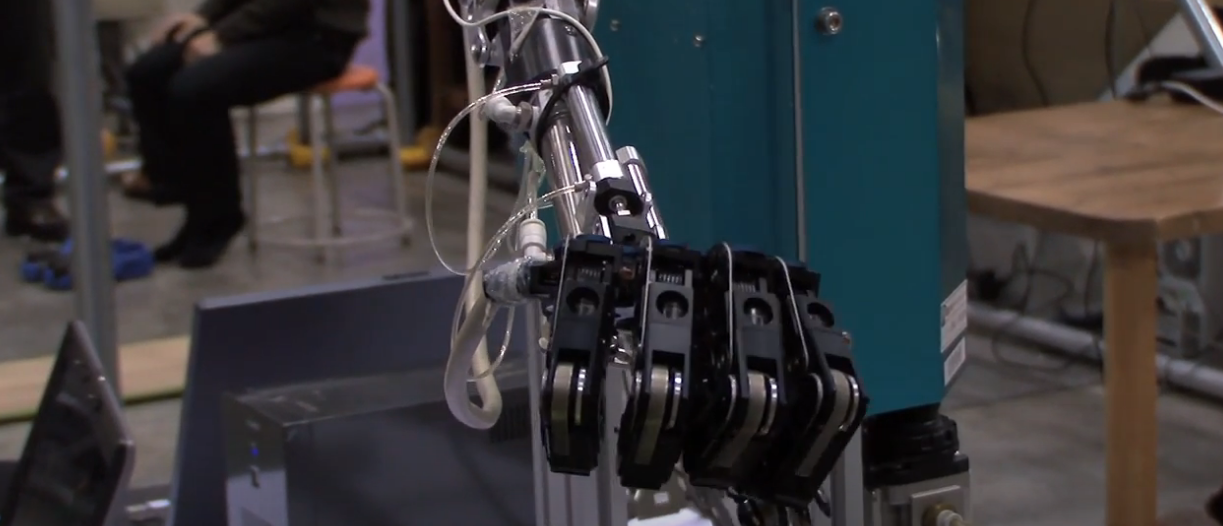
The Biological Cybernetics Lab at Tsukuba University here demonstrate a robotic arm that mimics a user's movement via Kinect-like camera. It can recognize over 100 different hand shapes (after all, some of us, myself included, have pretty weird hands), and checks over one hundred times per second what position your hand is in, so it can adjust itself accordingly.
The idea is not only to provide a real-time robotic control solution, but also an intuitive way to program a robotic arm, for those of us who are code-stupid.
Of course, the system isn't perfect, and that lag won't make for any real-time life-sized Rock'em Sock'em Robots any time soon, but for a prototype, I'd be willing to claim that this is all sorts of bitchin'.
Related TECHi reading: AI Intelligence archive, latest TECHi stories, and TECHi archive.
About the Author

Ty is an illustrator who stays up too late and must wear glasses.